At PressedOn Tech, we create a number of productivity tools, and also blog about our side projects.
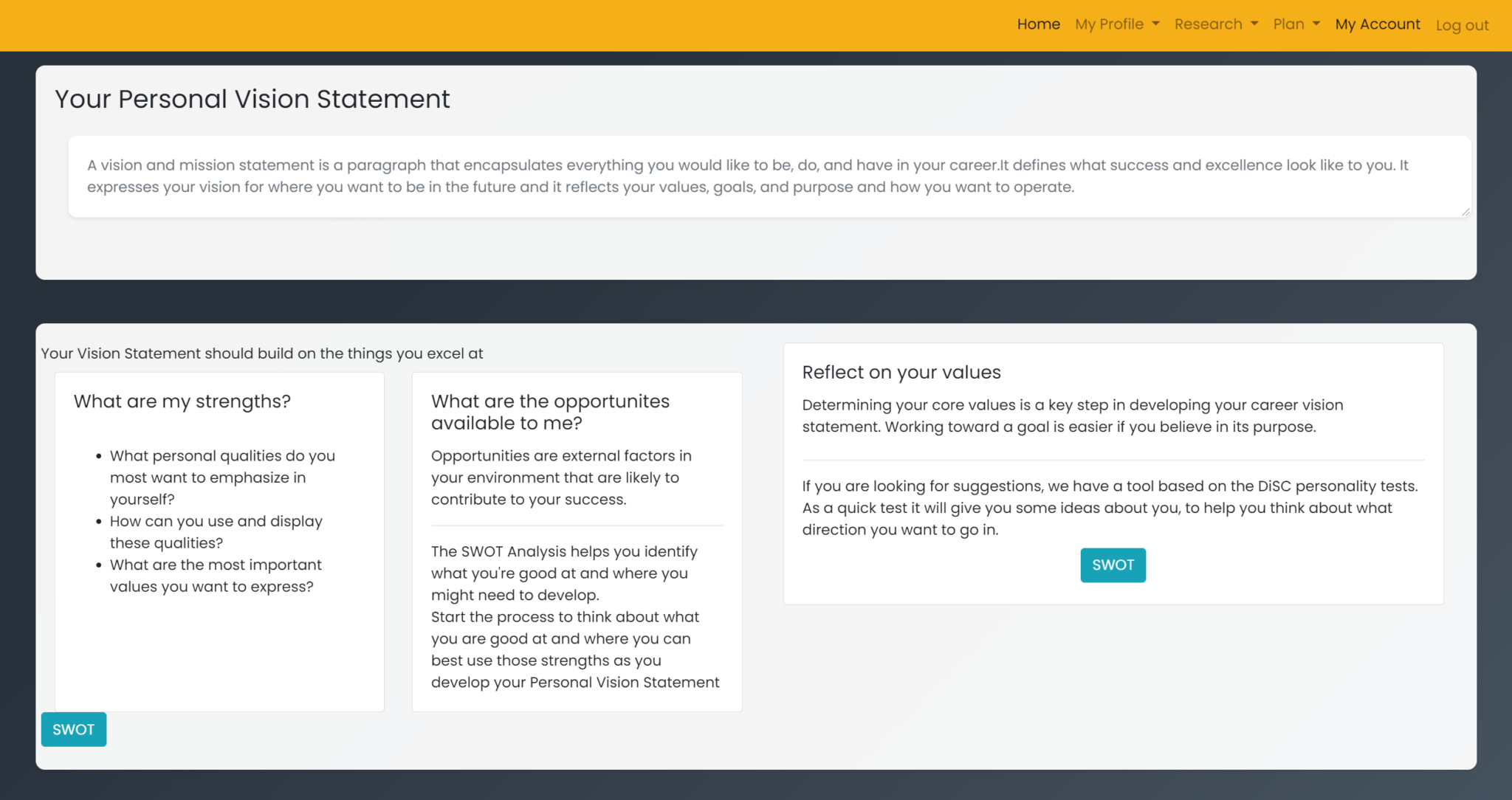
The Career Coach is a Personal Development Tool designed to help you achieve your goals. Learn more here:
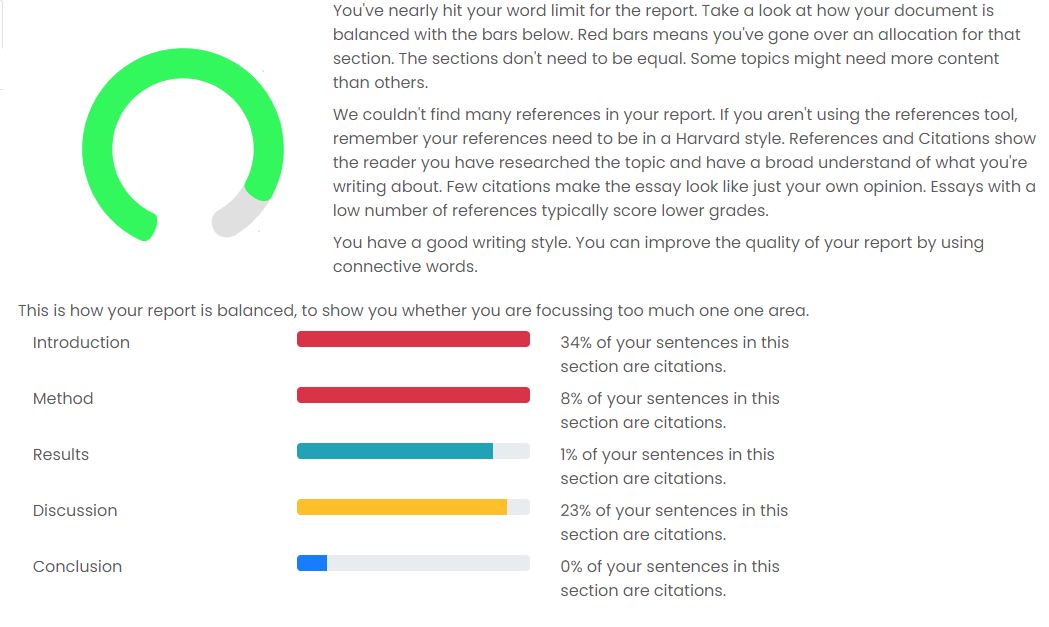
Sharper Pages is a document editing tool to help students with their essays. It helps structure the essay to make sure you’ve got all your topics included. And then gives you help on improving your writing style, making sure you have the correct citations and ensuring you cover each topic equally